Cos contidos que se enumeran a continuación crea unha entrada nova no teu blog co nome de Tema 1 Sociedade do Coñecemento: DOMOTICA
- Definición completa de Robot e Robótica. Explica os termos reprogramable e multifuncional aplicados a un robot.
- Características dos robots.
- Tipos de robots según o sistema de coordenadas. Captura de pantalla os debuxos de sistemas de coordenadas e os pegas en Open Office Draw, os recortas e engades os textos correspondentes co cadro de textos que aparece no cadro de ferramentas da parte inferior da pantalla. Unha vez rematado exportas o arquivo en formato .PNG e o insertas como imaxe no teu blog.
- Tipos de sensores empregados nos robots. En cada apartado inclue unha imaxe.
- Clasificación xeral. En cada apartado inclue unha imaxe.
- Definición de Robot e Robótica. Explica os termos reprogramable e muntifuncional aplicados a un robot.
- Autonomía: O sistema de navegación reside na propia máquina, que debe operar sen conexión física a equipos externos.
- Intelixencia: O robot posúe capacidade de razoar ata o punto de ser capaz de tomar as súas propias decisións e de seleccionar, fusionar e integrar as medidas das súas sensores.
Poderiamos aproximarnos a unha definición de Robótica como: o deseño, fabricación e utilización de máquinas automáticas programables co fin de realizar tarefas repetitivas como o ensamble de automóbiles, aparellos, etc. e outras actividades. Segundo Isaac Asimmov, a Robótica é a tecnoloxía aplicada aos robots.
Un robot reprogramable pódese modificar para non ter que usar outa máquina só volvendo a programala.
Multifuncional pode desenrolar varias funcións modificando a súa ferramenta.
- Características dos robots.
- A precisión que teñen á hora de realizar unha acción ou movemento.
- A capacidade de carga, en quilogramos que o robot pode manexar.
- O grao de liberdade que teñen cos seus movementos. Adoita coincidir co non de articulacións que ten o robot.
- O sistema de coordenadas que especifica a que direccións se realizasen as súas movementos e posicións. Estas poden ser coordenadas cartesianas (x,e,z), cilíndricas, etc.
- Tipos de robots según o sistema de coordenadas. Captura de pantalla os debuxos de sistemas de coordenadas e os pegas en Open Office Draw, os recortas e engades os textos correspondentes co cadro de textos que aparece no cadro de ferramentas da parte inferior da pantalla. Unha vez rematado exportas o arquivo en formato .PNG e o insertas como imaxe no teu blog.


- Tipos de sensores empregados nos robots. En cada apartado inclue unha imaxe.
- Sensores de temperatura:
Un exemplo son os termistores: trátase de resistencias cuxo valor ascende con a temperatura (termistor PTC) ou ben diminúe coa temperatura (termistor NTC). Por tanto, depende da temperatura que o termistor permita ou non o paso da corrente polo circuíto de control do sistema. O símbolo e a aparencia dun termistor é:


- Sensores de posición:
Entre outros temos:
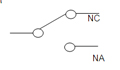
- Finais de carreira: Trátase dun interruptor que consta dunha pequena peza móbil e dunha peza fixa que se chama NA, normalmente aberto, ou NC, normalmente pechado.

posición dun elemento móbil, coa vantaxe de que non necesita ser empuxado fisicamente polo devandito elemento senón que pode detectar a proximidade sen contacto directo.


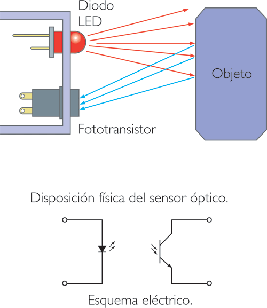
-Ópticos: Detectan a presenza dunha persoa ou dun obxecto que nterrumpen o feixe de luz que lle chega ao sensor.
Os principais sensores ópticos son as fotorresistencias, as LDR.

Baséanse en que a auga non é un material illante como o aire senón que ten unha condutividade eléctrica. Por tanto un par de cables eléctricos espidos (sen cinta illante recubríndoos) van conducir unha pequena cantidade de corrente se o ambiente é húmido; se colocamos un transistor en zona activa que amplifique esta corrente temos un detector de humidade.


- Sensores de son:
Mediante un difragma que ao moverse polas ondas sonoras, despraza a placa dun condensador facendo variar a súa capacidade.


- Clasificación xeral. En cada apartado inclue unha imaxe.
Desde un punto de vista moi xeral os robots poden ser dos seguintes tipos:
Androides:
Os androides son dispositivos que se parecen e actúan como seres humanos. Os robots de hoxe en día veñen en todas as formas e tamaños, pero fóra dos robots que aparecen nas feiras e espectáculos, non se parecen ás persoas e por tanto non son androides. Actualmente, os androides reais só existen na imaxinación e nas películas de ficción.

Os robots móbiles están provistos de patas, rodas ou orugas que os capacitan para desprazarse de acordo á súa programación. Elaboran a información que reciben a través de os seus propios sistemas de sensores e empréganse en determinado tipo de instalacións industriais, sobre todo para o transporte de mercadorías en cadeas de produción e almacéns. Tamén se utilizan robots deste tipo para a investigación en lugares de difícil acceso ou moi distantes, como é o caso da exploración espacial e das investigacións ou rescates submarinos.

Industriais:
Os robots industriais son dispositivos mecánicos e electrónicos destinados a realizar de forma automática (sen a intervención humana) determinados procesos de fabricación ou manipulación. Os robots industriais, na actualidade, son con moito os máis frecuentemente atopados. Xapón e Estados Unidos lideran a fabricación e consumo de robots industriais sendo Xapón o número uno.
Os robots industriais xorden pola necesidade de:
- Fabricar produtos de maneira económica.
- Que os produtos sexan de calidade.
- Que dun mesmo produto póidanse elixir moitas opcións.
Como exemplo, pensa nun automóbil, dun mesmo modelo, podes elixir, a cor, o número de portas, o tipo de lamias, con ou sen alerón e todas as opcións de acabado interior. Unha fábrica de coches, que constrúe cada día uns mil coches, cada un cos seus distintas opcións, necesita utilizar robots para que estes coches podámolos comprar a un prezo alcanzable e teñamos garantía do seu funcionamento.

Robots para próteses médicas:
Son as próteses robóticas e os recentes robots de asistencia en quirófano (como o robot cirurxián Dá Vinci).